7.17 Example — Parabolic Mirror Shift
PDF section 7.17. Source script: KrakenOS/Examples/Examp_ParaboleMirror_Shift.py.
Builds an off-axis parabolic mirror using k = -1 (parabola) plus a
ShiftY to offset the surface profile away from the optical axis. Useful
for off-axis collectors and feeds.
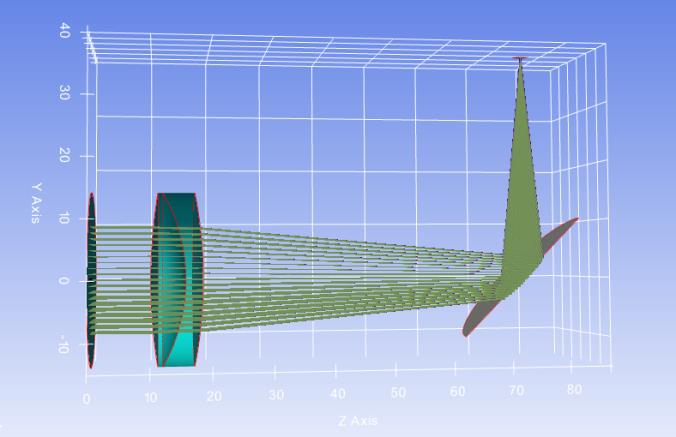
Figure 24a. Off-axis parabolic mirror — first view.
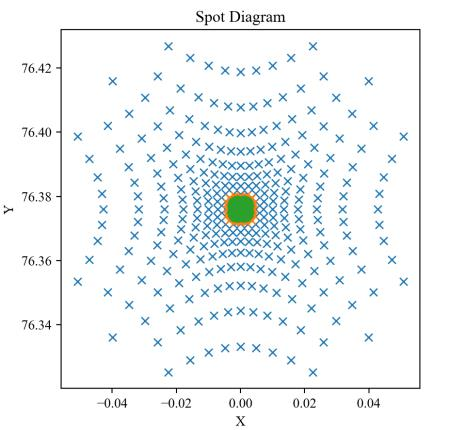
Figure 24b. Off-axis parabolic mirror — second view.
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""Examp Parabole Mirror Shift"""
import numpy as np
from importlib import metadata
import pickle
required = {'KrakenOS'}
installed = {dist.metadata["Name"] for dist in metadata.distributions() if dist.metadata.get("Name")}
missing = {pkg for pkg in required if pkg not in installed}
if missing:
print("No instalado")
import sys
sys.path.append("../..")
import KrakenOS as Kos
# ______________________________________#
P_Obj = Kos.surf()
P_Obj.Thickness = 1000.0
P_Obj.Diameter = 300
P_Obj.Drawing = 0
# ______________________________________#
M1 = Kos.surf()
M1.Rc = -2 * P_Obj.Thickness
M1.Thickness = M1.Rc / 2
M1.k = -1.0
M1.Glass = "MIRROR"
M1.Diameter = 300
M1.ShiftY = 200
# M1.DerPres= 0.04
aa = 100
bb = 100
# ______________________________________#
P_Ima = Kos.surf()
P_Ima.Glass = "AIR"
P_Ima.Diameter = 1600.0
P_Ima.Drawing = 0
P_Ima.Name = "Plano imagen"
# ______________________________________#
A = [P_Obj, M1, P_Ima]
configuracion_1 = Kos.Setup()
# ______________________________________#
Espejo = Kos.system(A, configuracion_1)
# Espejo = Kos.system_Lite(A, configuracion_1)
# with open('mi_objeto.pkl', 'wb') as archivo_salida:
# # Usa pickle.dump para serializar y guardar el objeto en el archivo.
# pickle.dump(Espejo, archivo_salida)
# with open('mi_objeto.pkl', 'rb') as archivo_entrada:
# Espejo = pickle.load(archivo_entrada)
Rayos = Kos.raykeeper(Espejo)
# ______________________________________#
tam = 15
rad = 150.0
tsis = len(A) - 1
for i in range(-tam, tam + 1):
for j in range(-tam, tam + 1):
x_0 = (i / tam) * rad
y_0 = (j / tam) * rad
r = np.sqrt((x_0 * x_0) + (y_0 * y_0))
if r < rad:
tet = 0.0
pSource_0 = [x_0, y_0, 0.0]
dCos = [0.0, np.sin(np.deg2rad(tet)), np.cos(np.deg2rad(tet))]
W = 0.4
Espejo.Trace(pSource_0, dCos, W)
Rayos.push()
# ______________________________________#
Kos.display2d(Espejo, Rayos, 0)
def R_RMS_delta(Z1, L, M, N, X0, Y0):
X1 = ((L / N) * Z1) + X0
Y1 = ((M / N) * Z1) + Y0
cenX = np.mean(X1)
cenY = np.mean(Y1)
x1 = (X1 - cenX)
y1 = (Y1 - cenY)
R2 = ((x1 * x1) + (y1 * y1))
R_RMS = np.sqrt(np.mean(R2))
return R_RMS
x,y,z,l,m,n = Rayos.pick(-1, coordinates="local")
print(R_RMS_delta(z, l, m, n, x, y))
X, Y, Z, L, M, N = Rayos.pick(-1)
# ______________________________________#
import matplotlib.pyplot as plt
plt.plot(X, Y, 'x')
plt.xlabel('x')
plt.ylabel('y')
plt.title('Spot Diagram')
plt.axis('square')
plt.show()